Features and Benefits
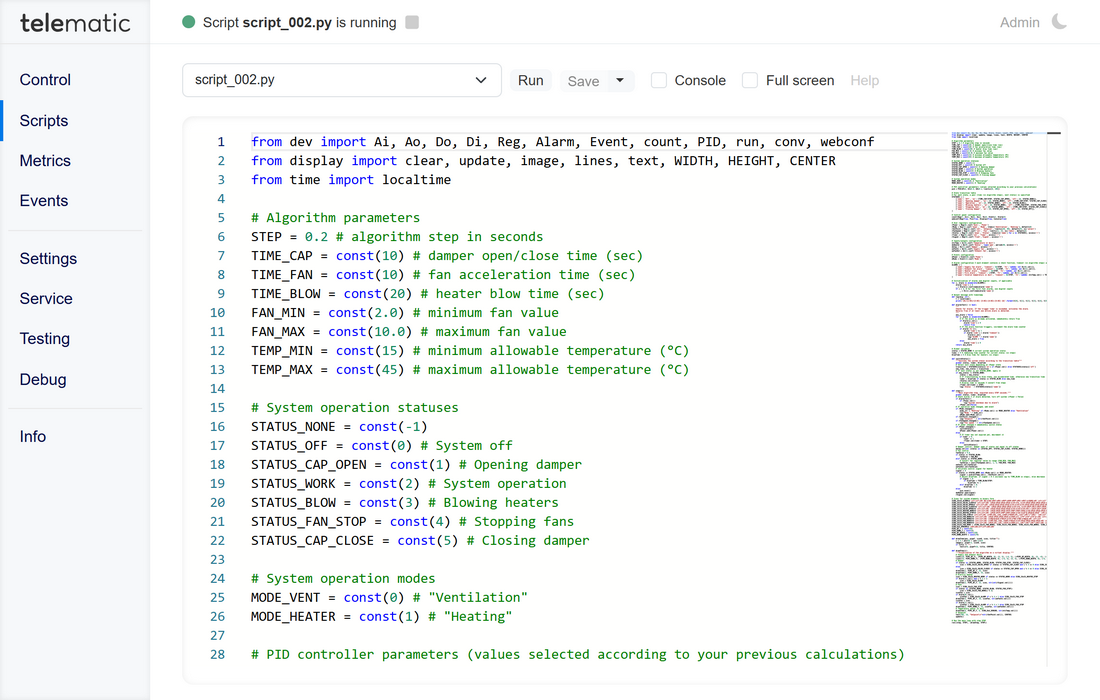
Python and C
User scripts are written in MicroPython and C.
IDE in a Web Browser
The development environment is provided by the controller itself via a web interface.
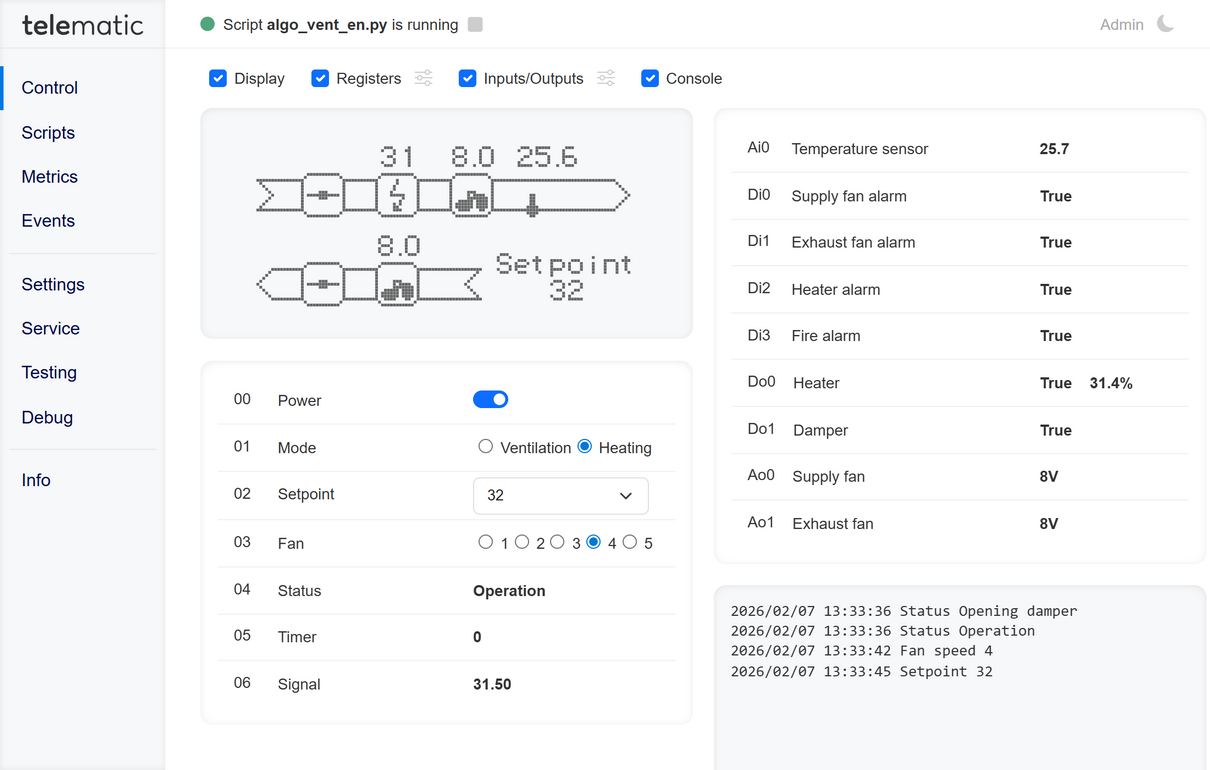
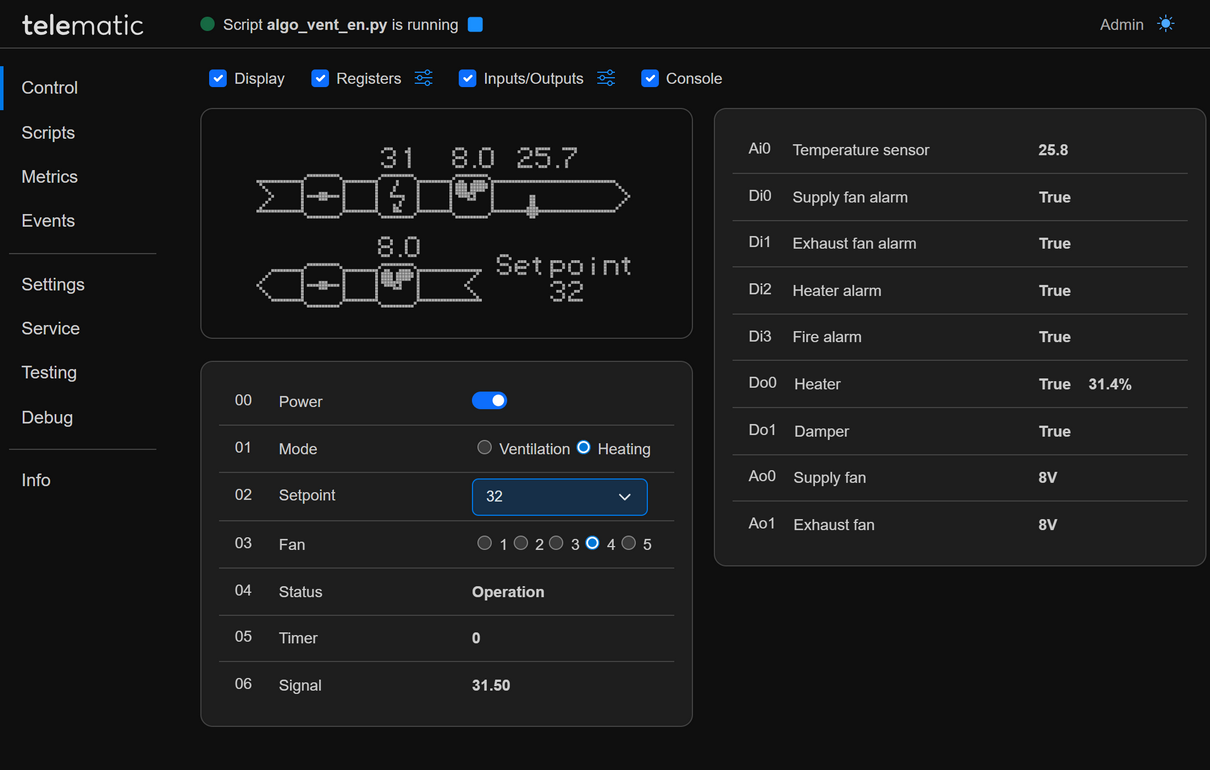
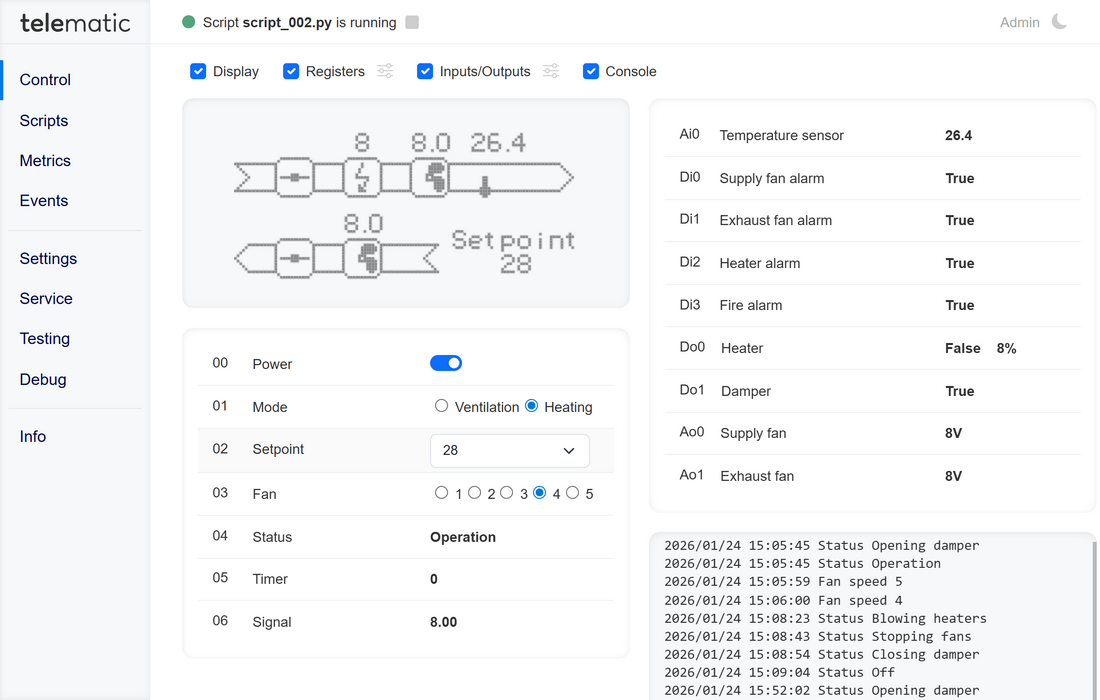
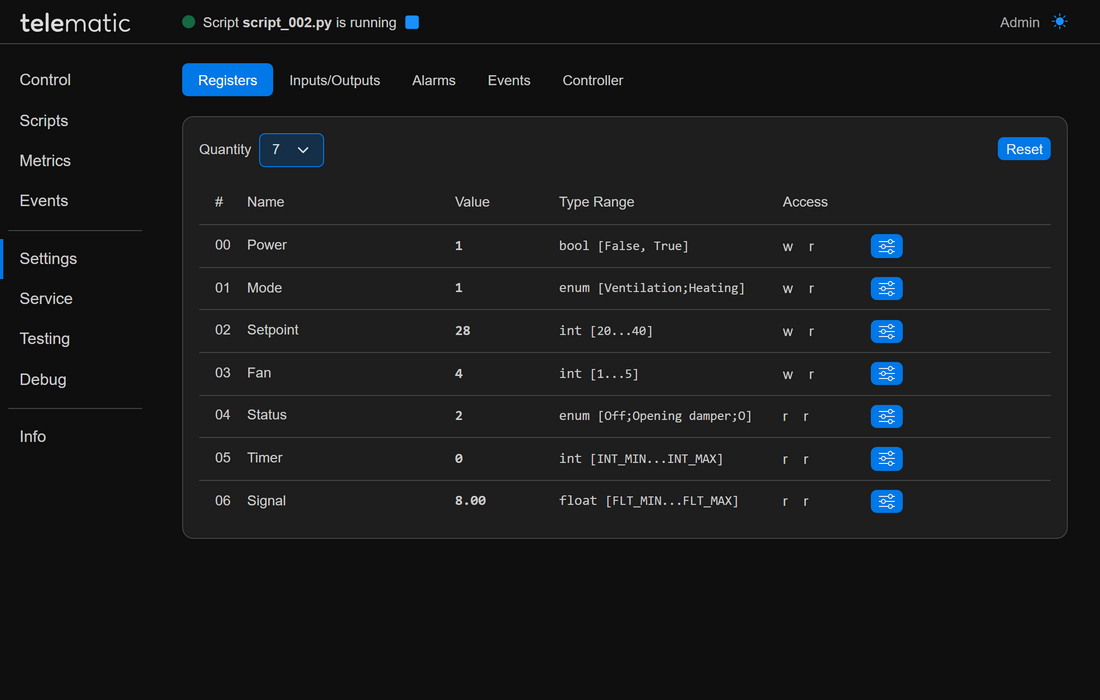
Control Panel
A user-configurable control panel (HMI) in the controller’s web interface.
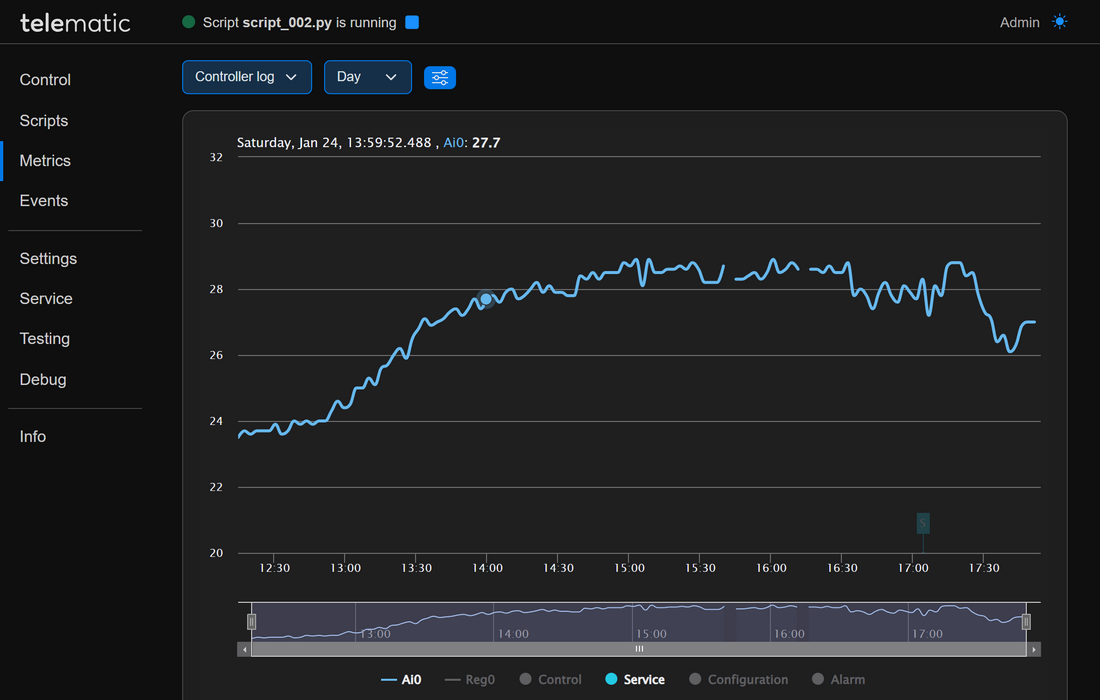
Visualization
A virtual graphic display for visualizing and indicating the workflow.
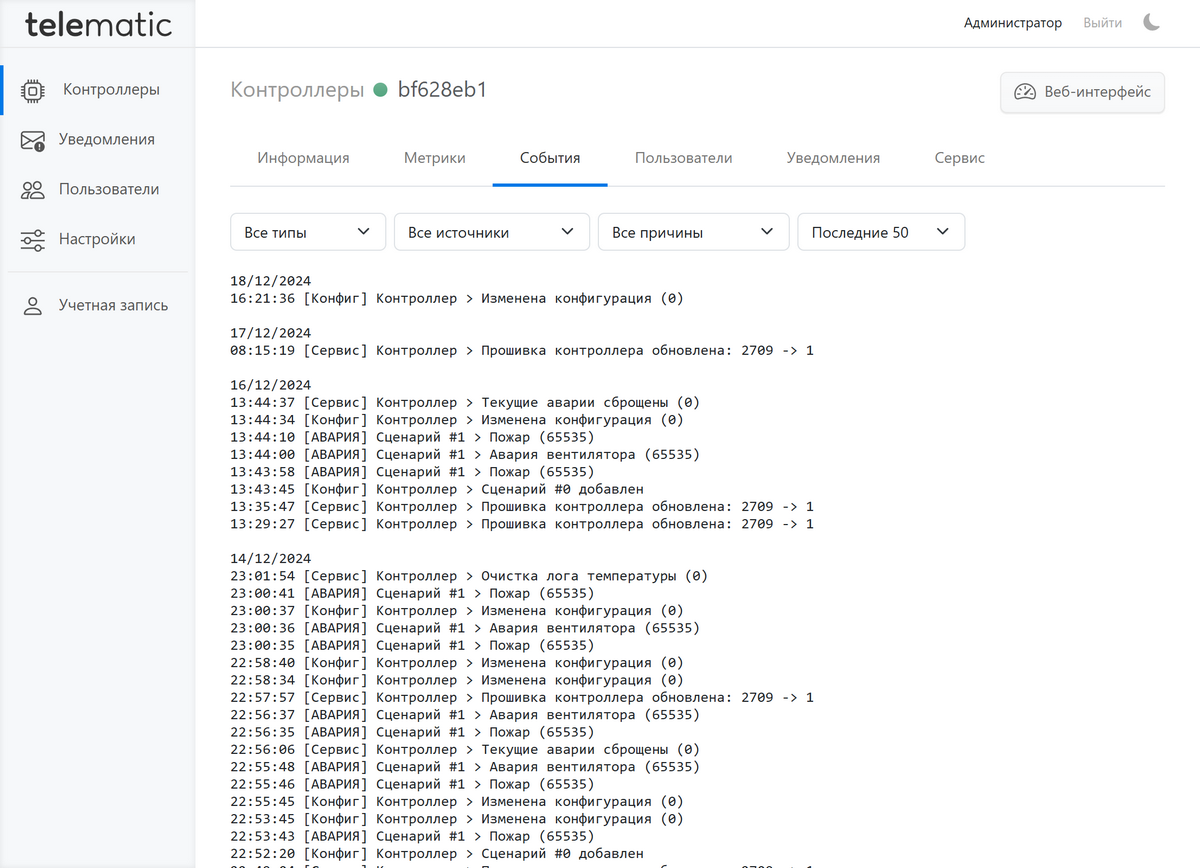
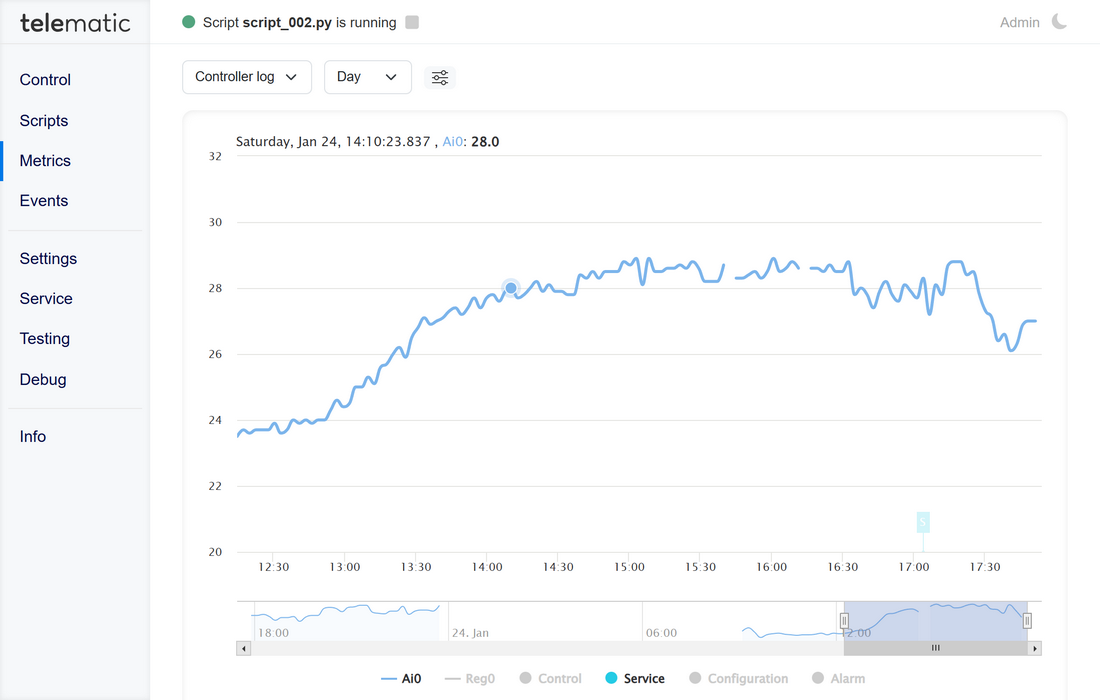
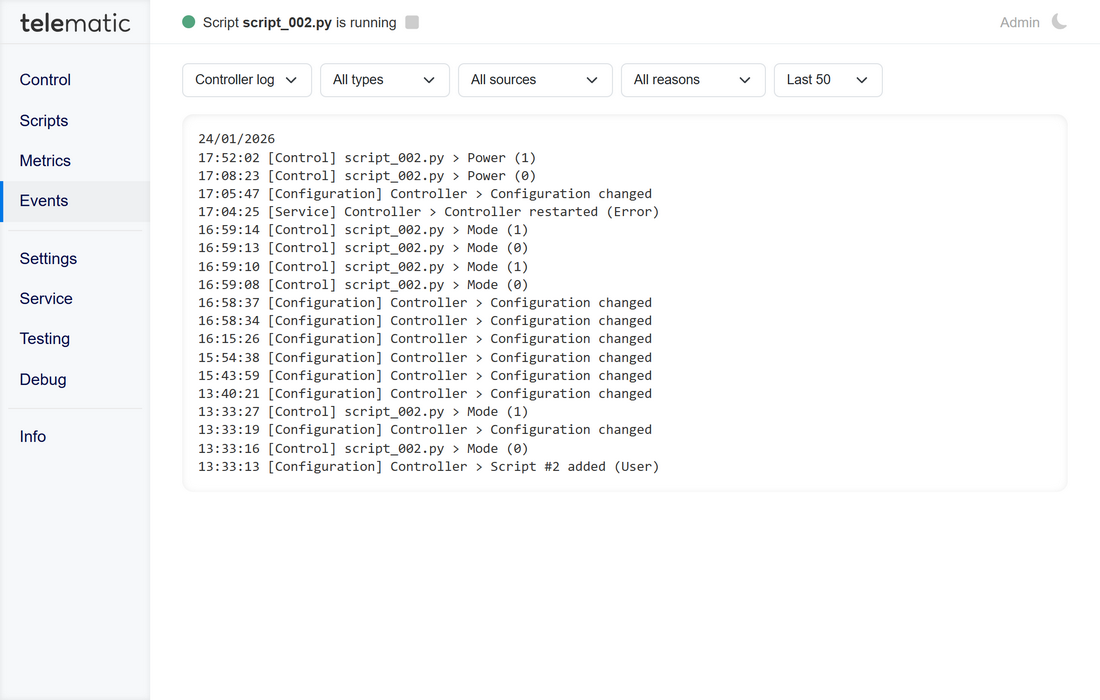
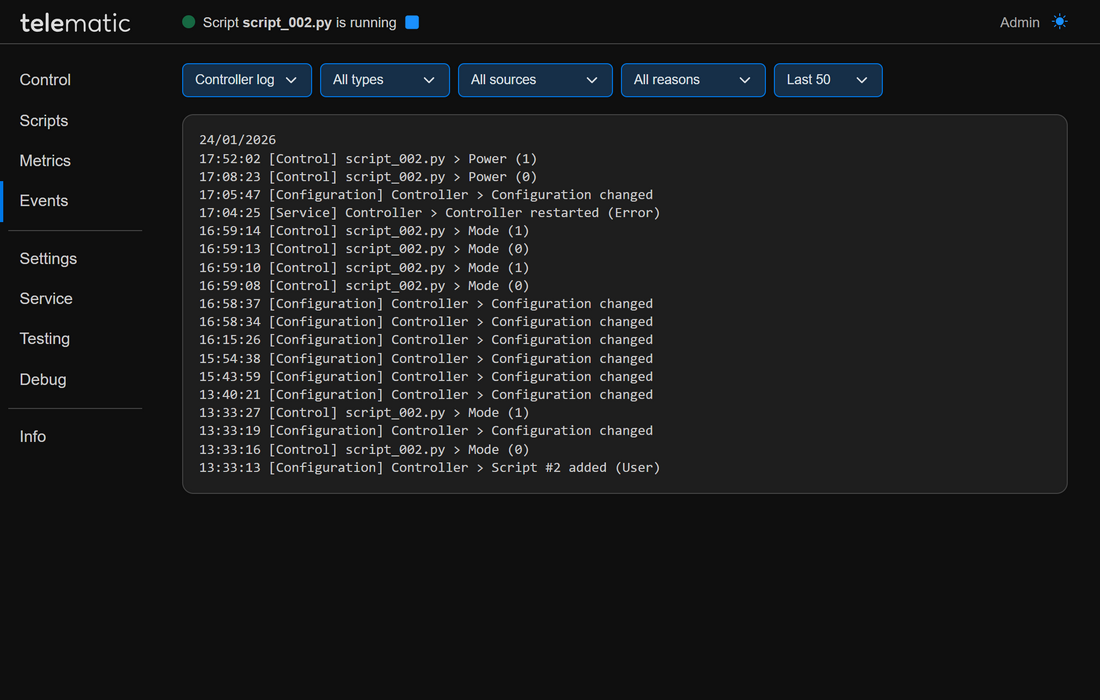
Event and Metrics Log
Saving events and graphs to the controller’s ROM and the cloud.
Smartphone Notifications
Sending alerts about accidents and abnormal situations to users’ smartphones.
Remote Access
Access the controller from anywhere via the Internet.
Dispatching
Support for Modbus RTU/TCP, SNMP, and REST API protocols.
High Performance
Response time in DI->DO scenarios on controller pins is 40 µs.
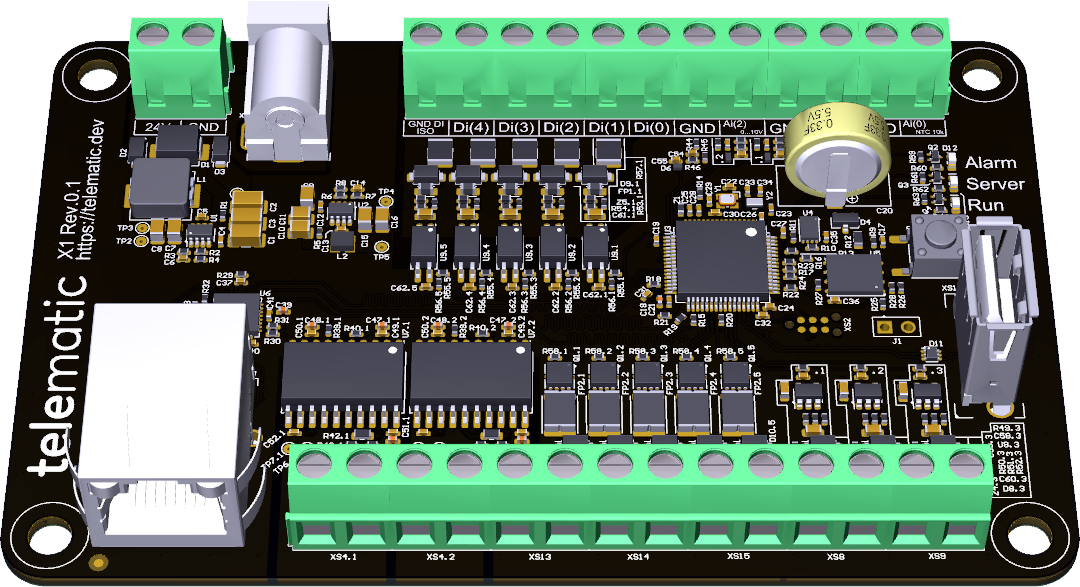
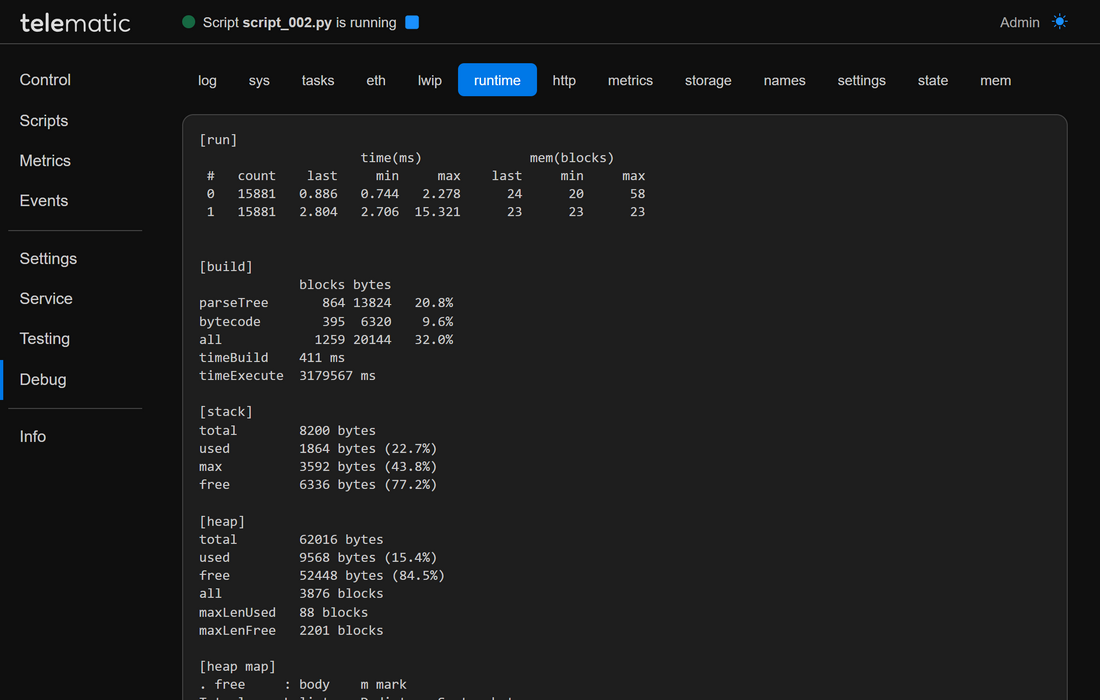
Specifications
Processor: ARM Cortex-M4 FPU, 120 MHz. RAM: 192 KB. Real-time clock: supercapacitor, up to 6 months of operation. In-house operating system.
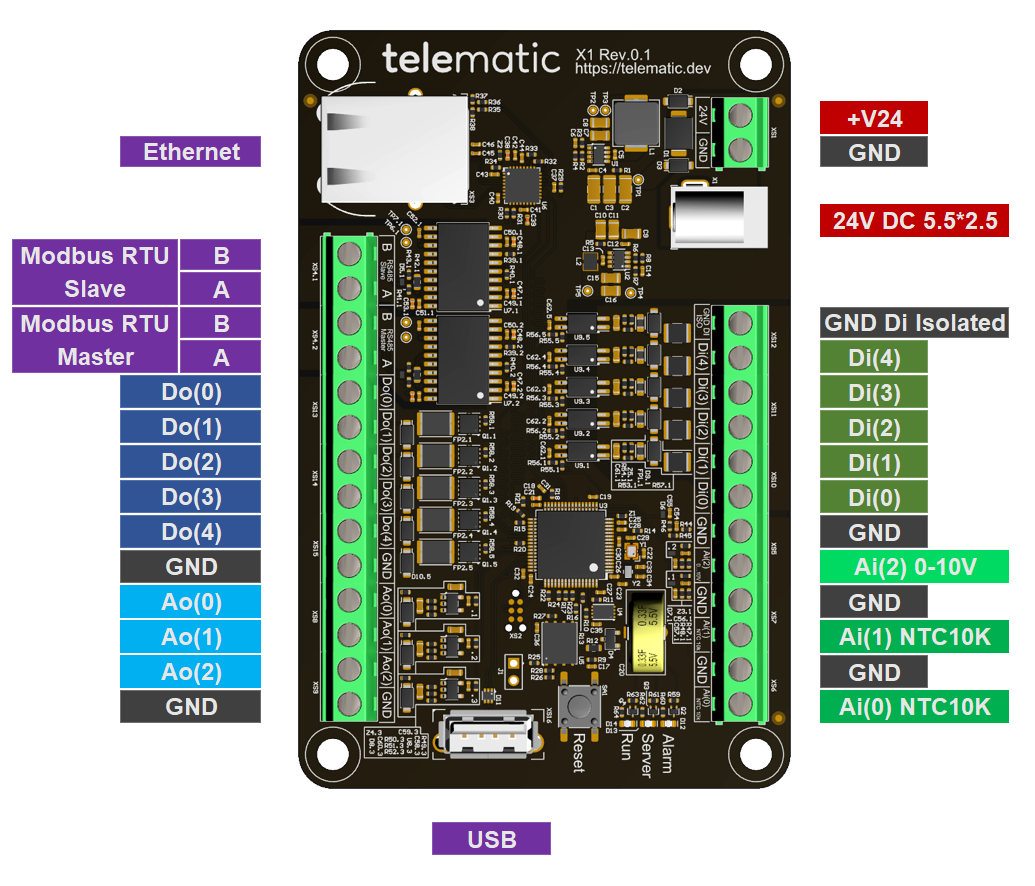
Discrete inputs 5 pcs.Nominal voltage: 24 V DC. Group galvanic isolation.
Discrete outputs 5 pcs.N-channel transistor.
Analog inputs 3 pcs.2 pcs. NTC 10K temperature sensors. 1 pc. 0-10 V input.
Analog outputs 3 pcs.0-10 V outputs.
InterfacesEthernet: IPv4, ICMP, TCP, UDP, DHCP, HTTP, SNMP, Modbus TCP, SNTP, REST API. RS-485: 2x Modbus RTU Slave/Master with galvanic isolation. USB Type-A.
PowerNominal voltage: 24V AC/DC. Current consumption: nominal 11 mA, maximum 17 mA. Connectors: terminal block; DC 5.5 x 2.5.
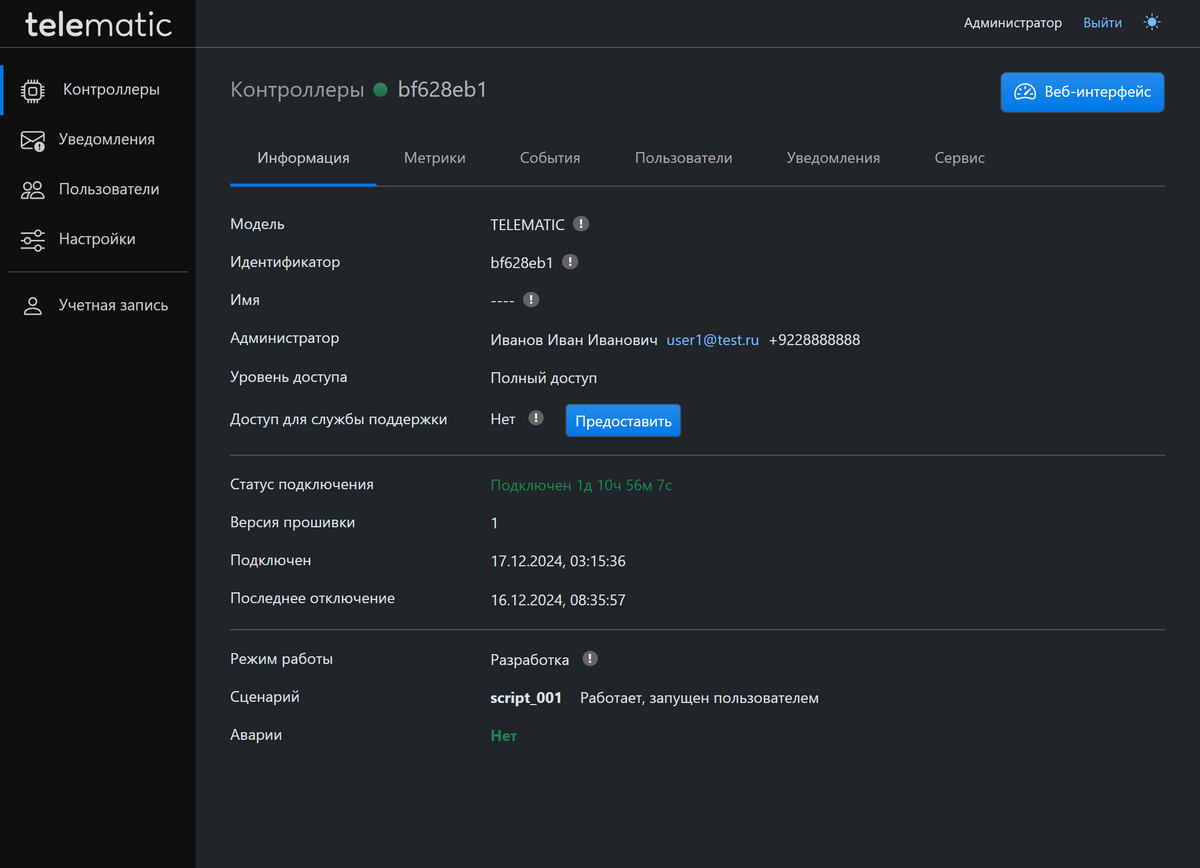
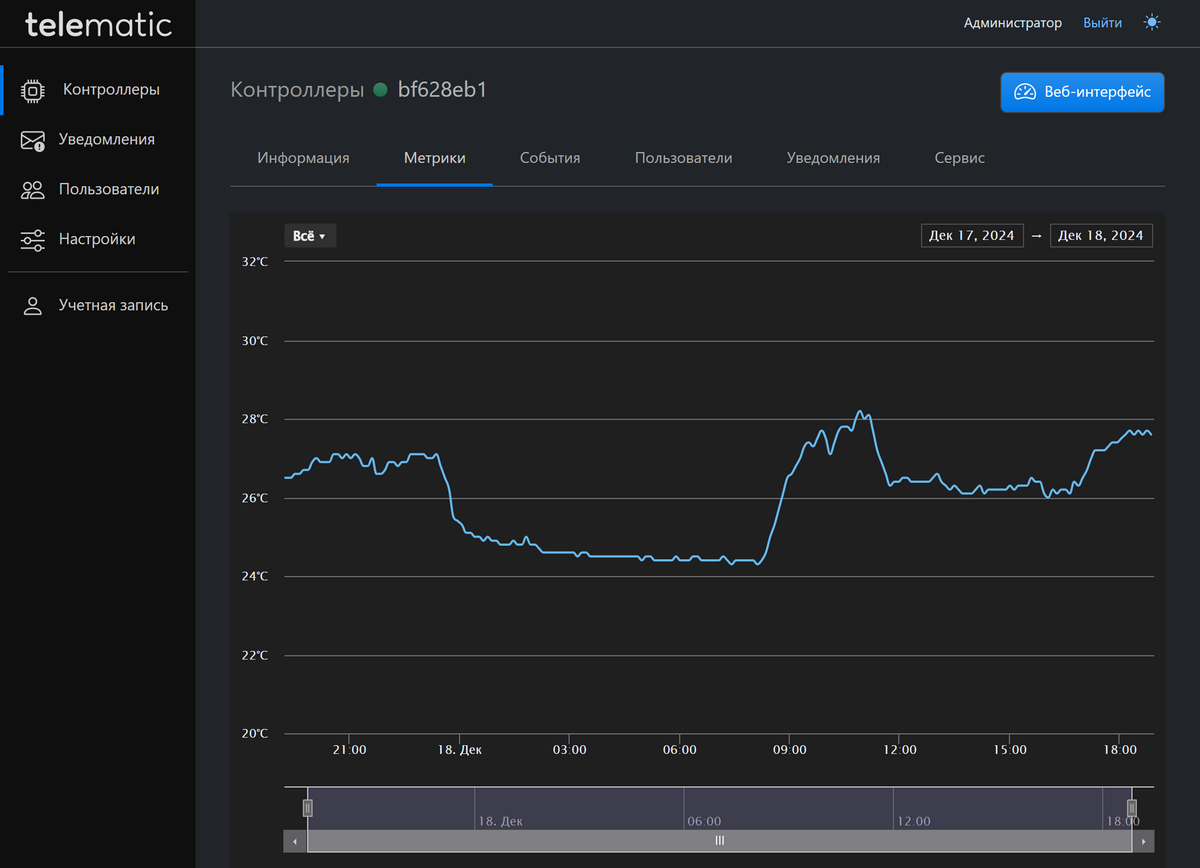
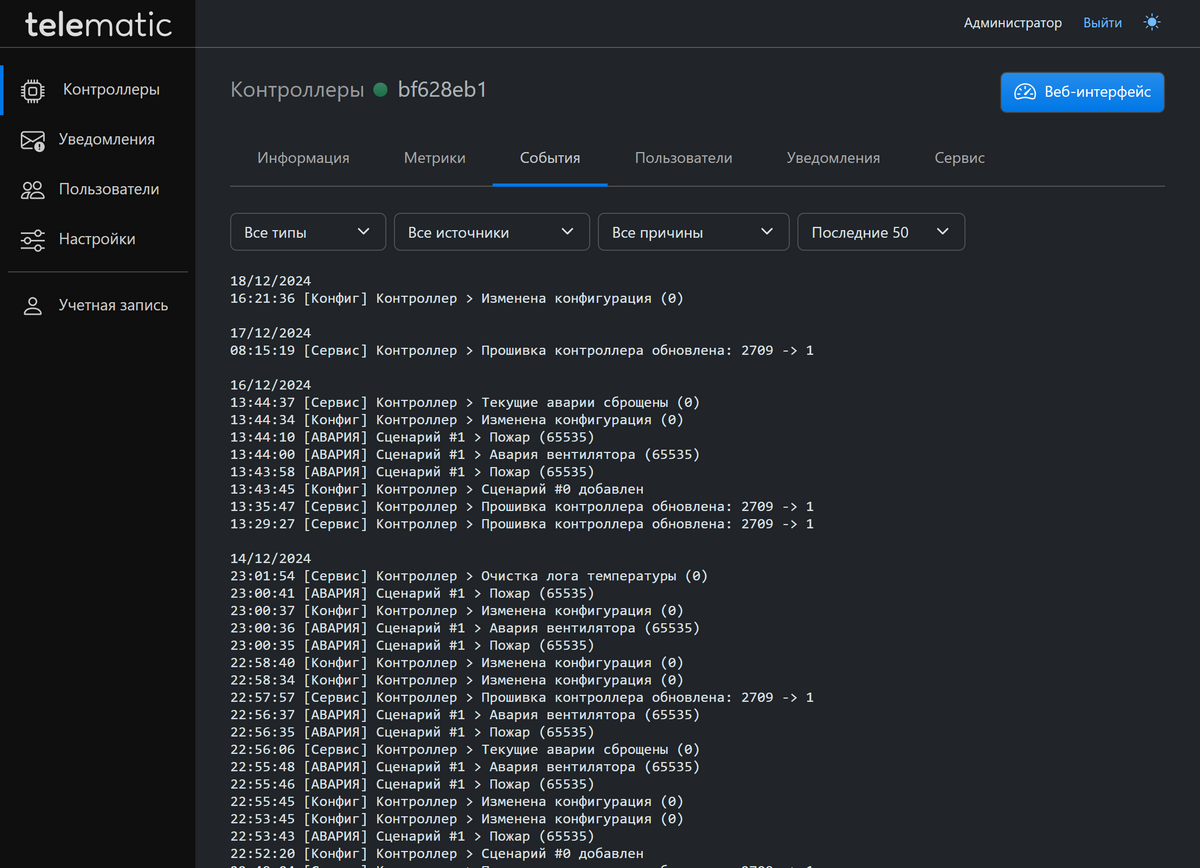
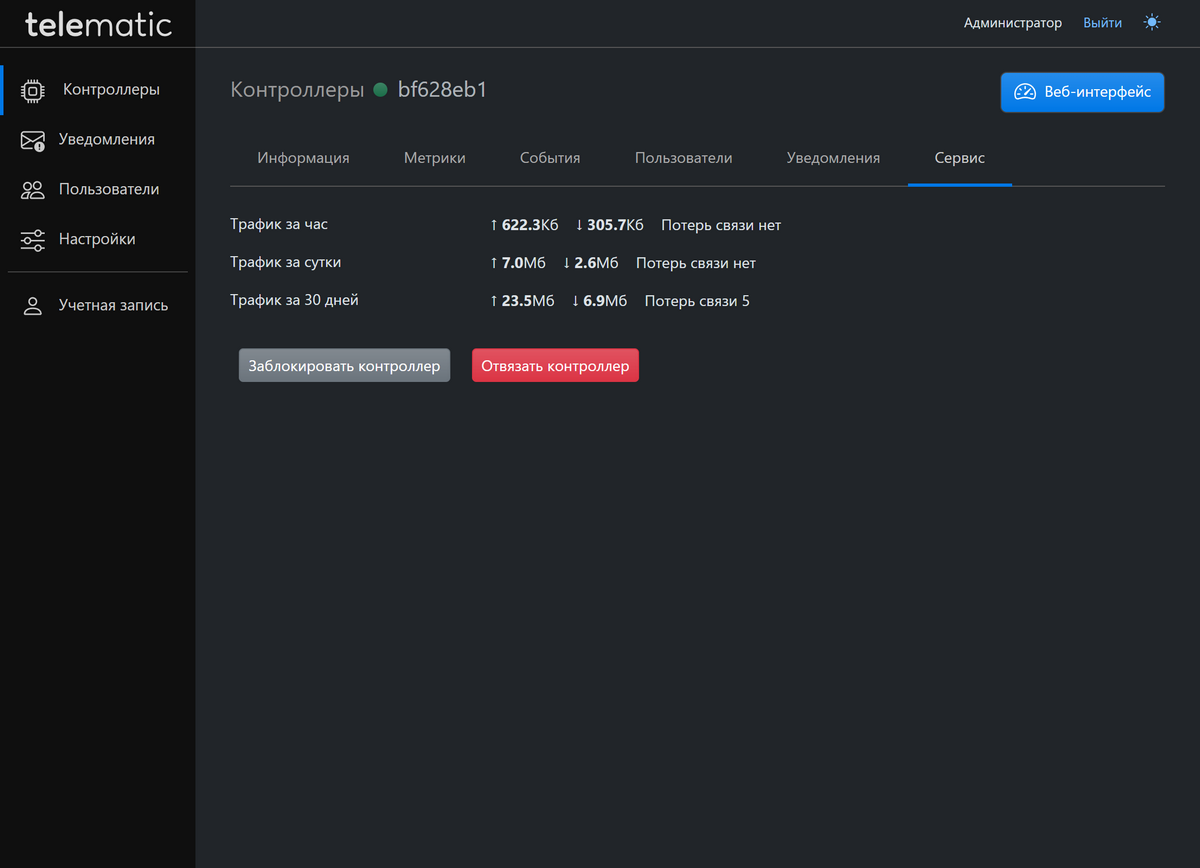
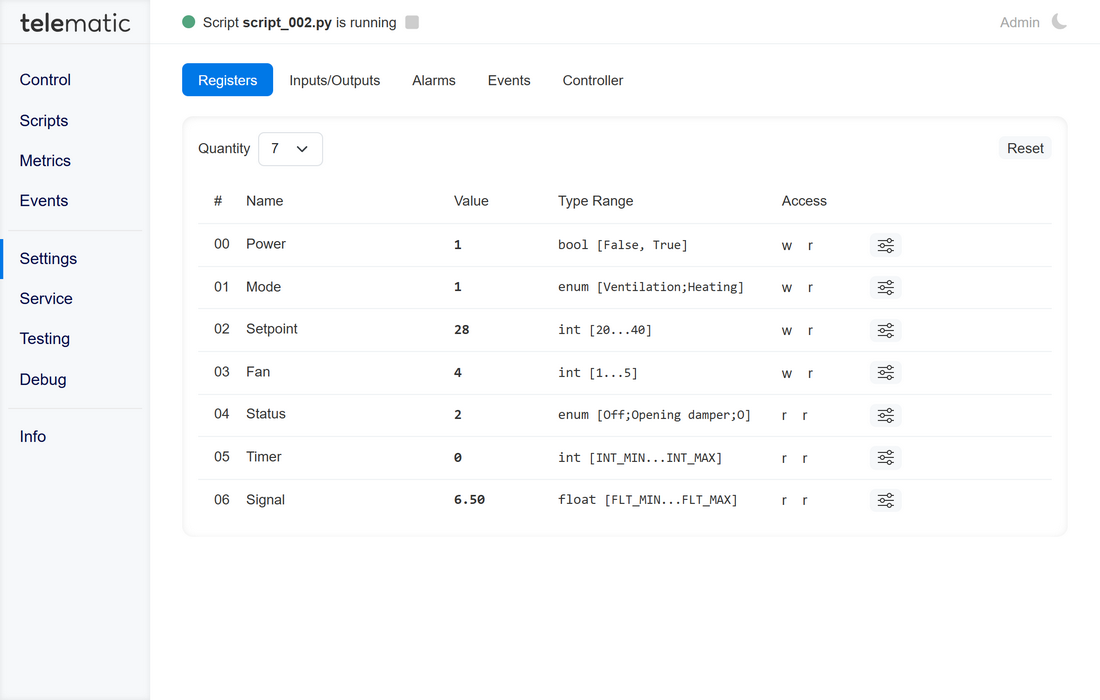
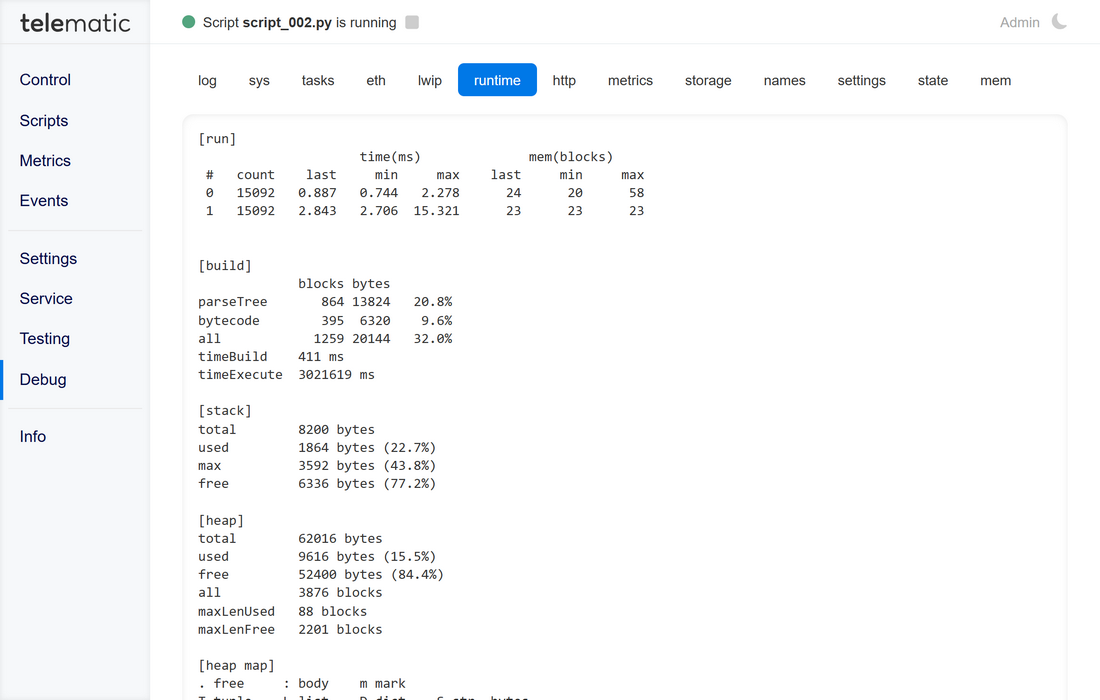
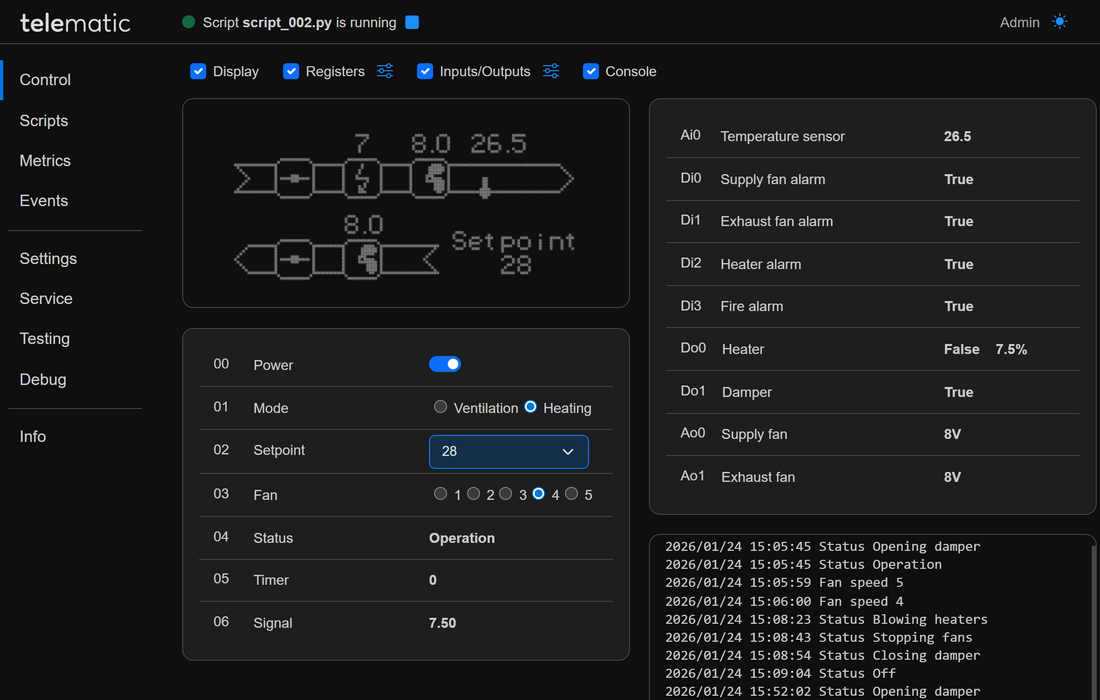
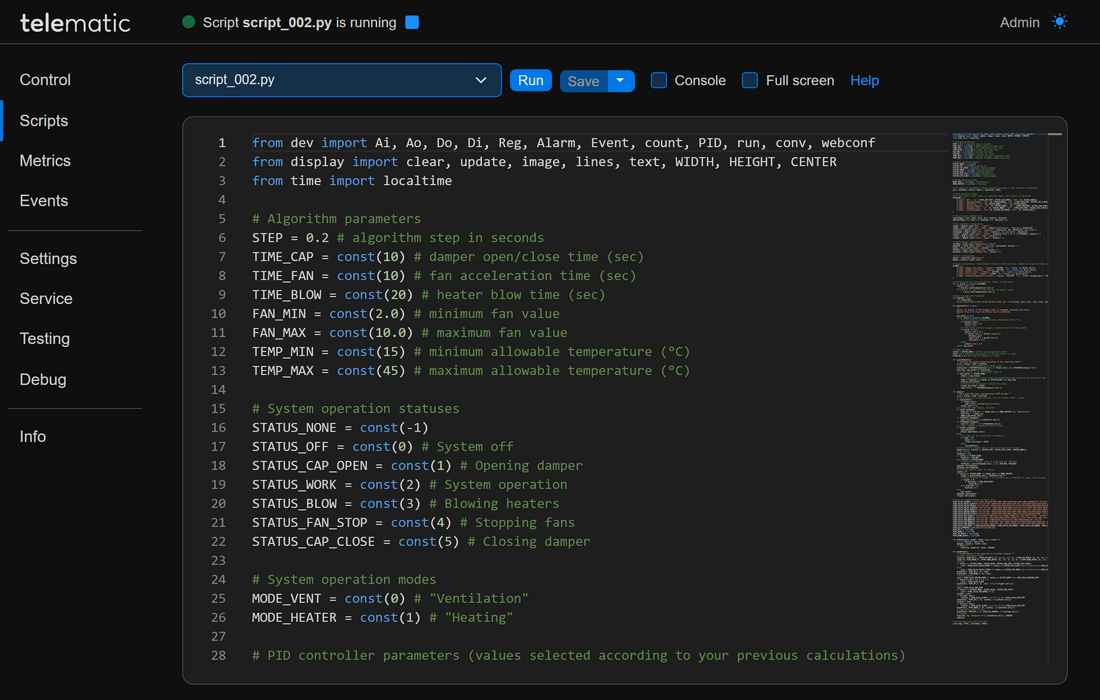
Controller web interface screenshots
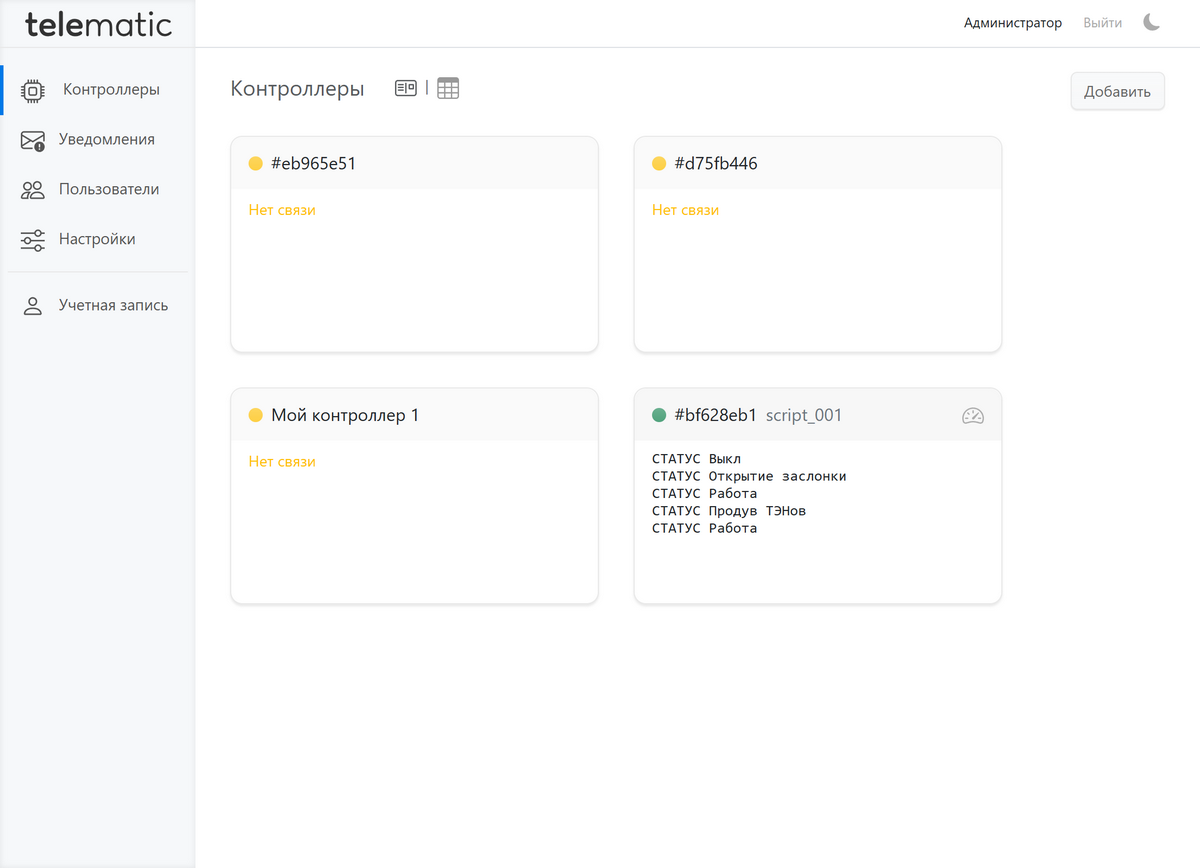
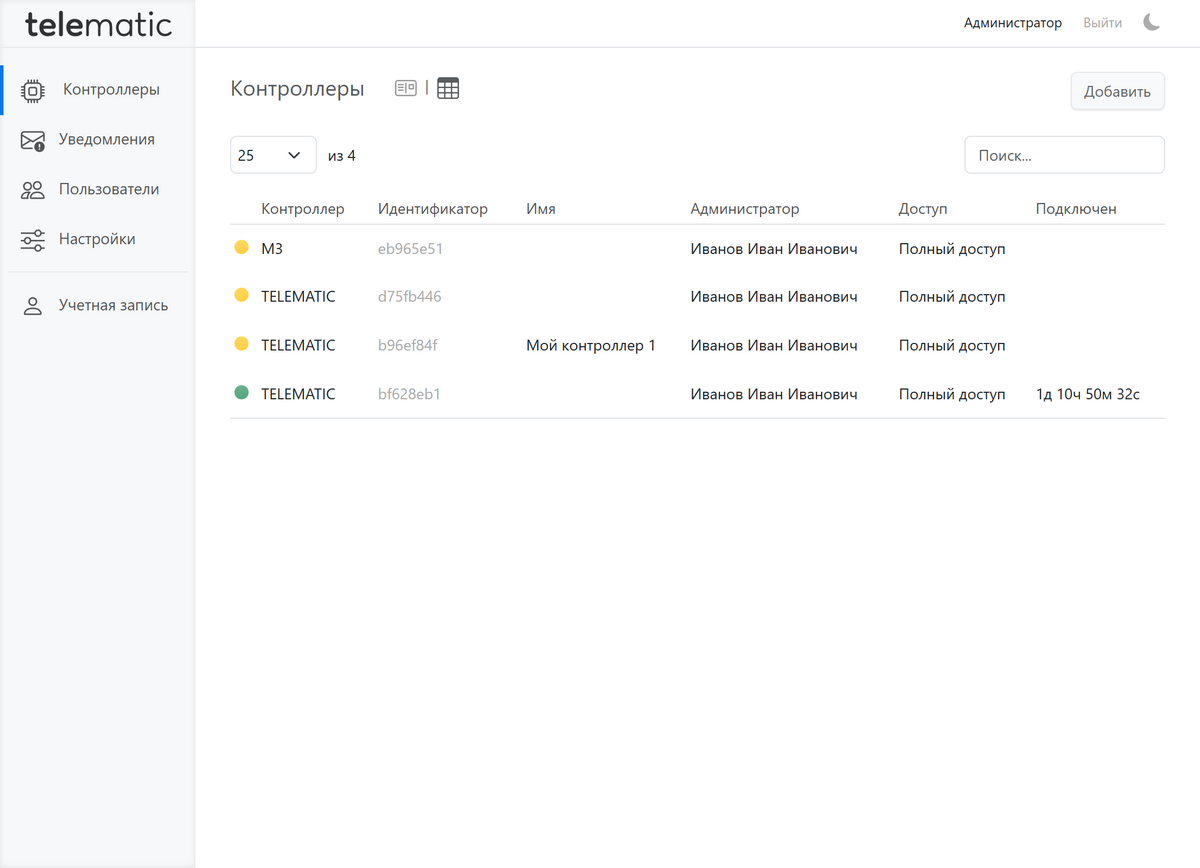
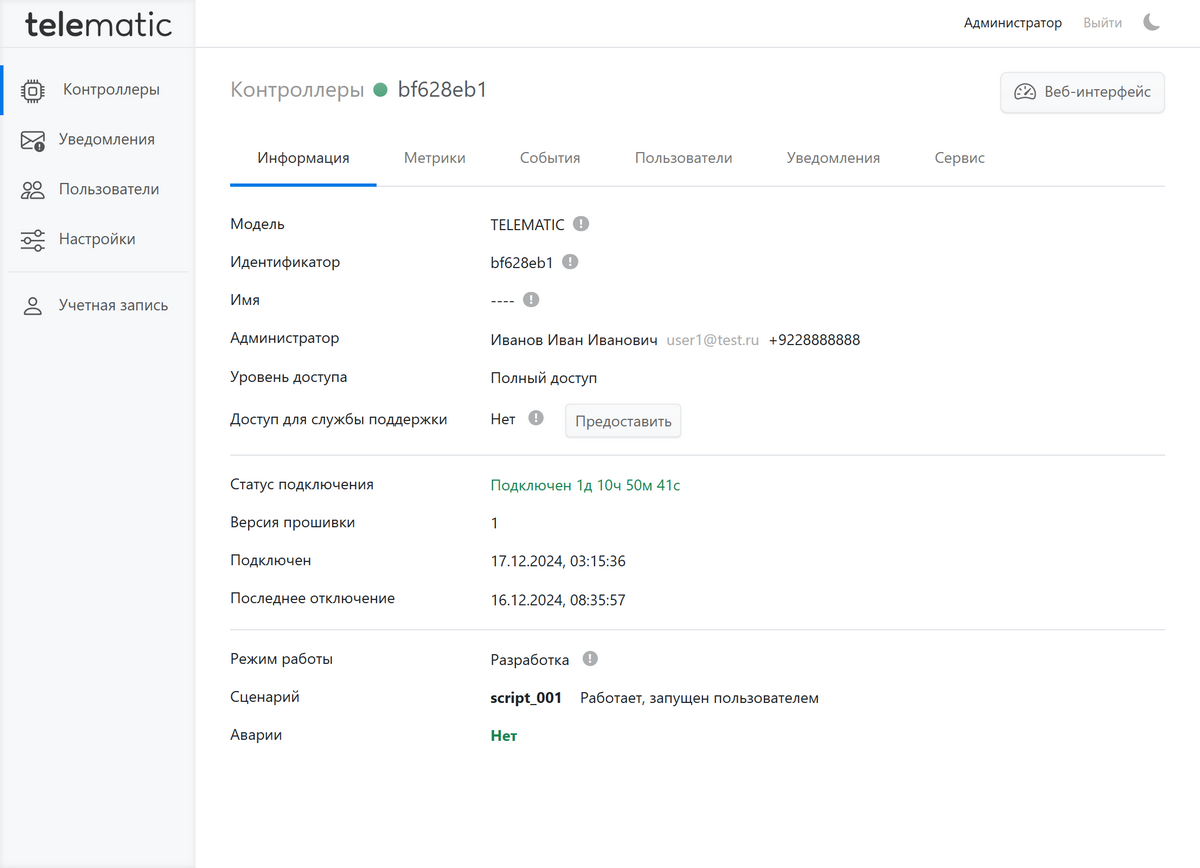
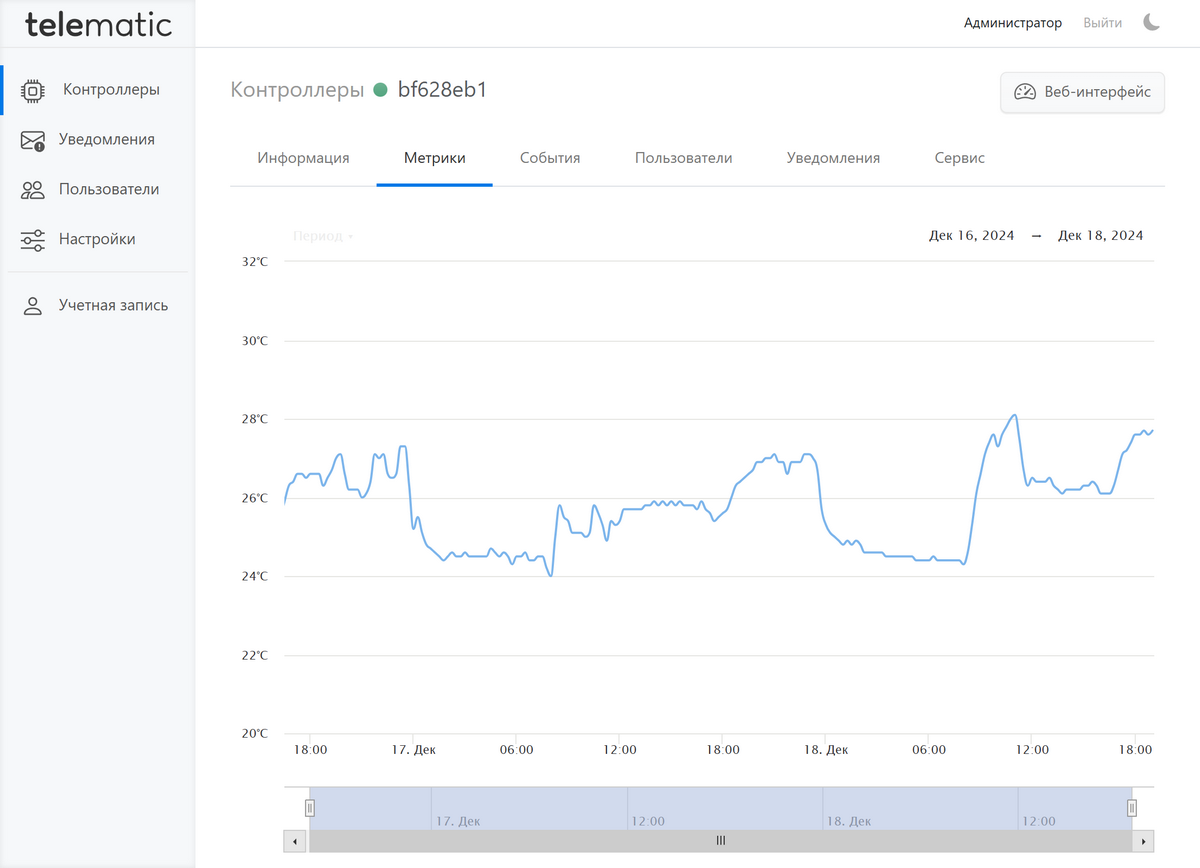
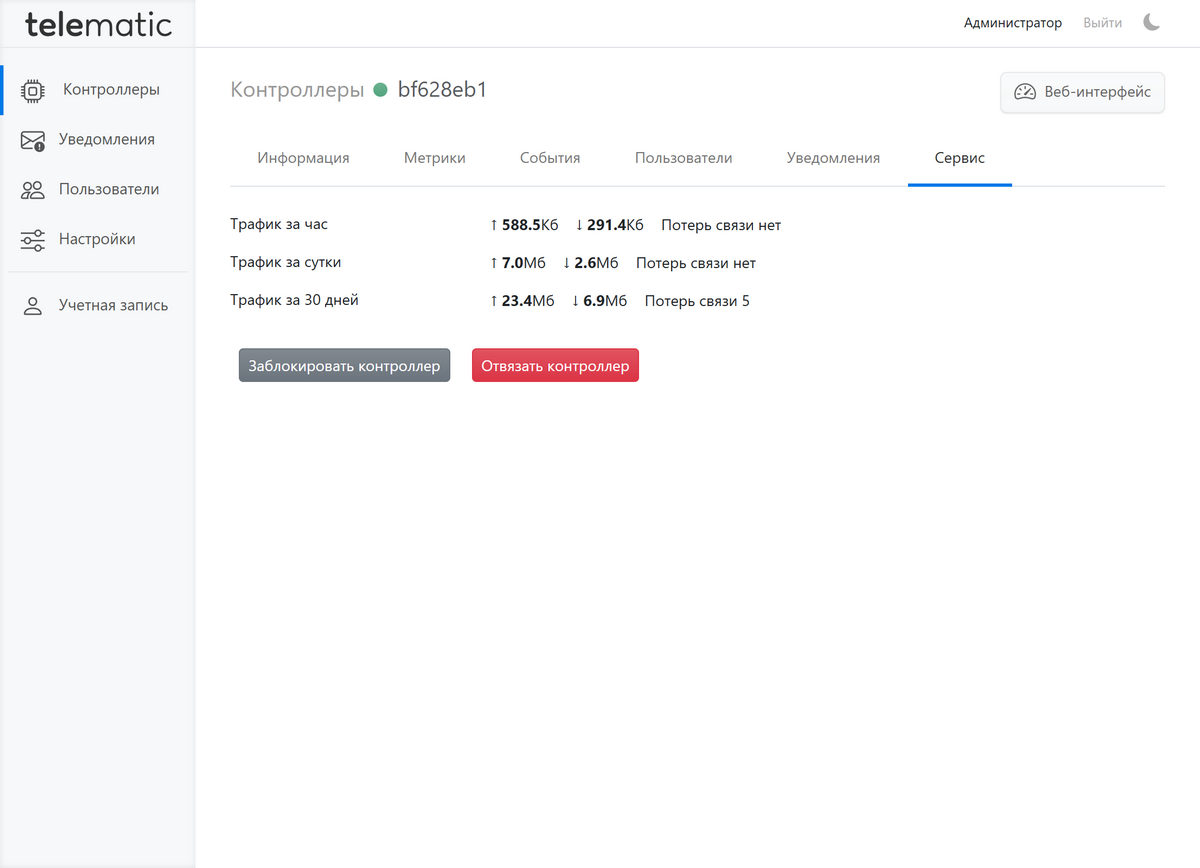
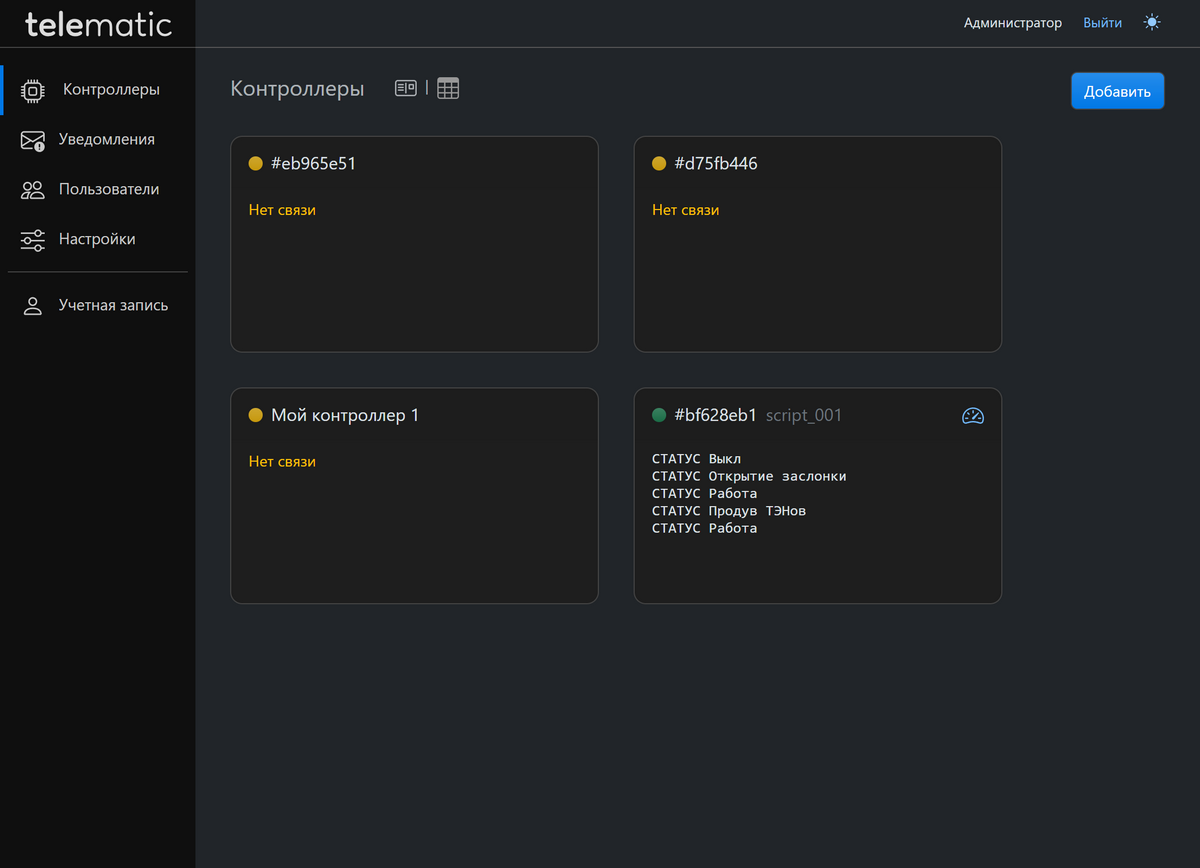
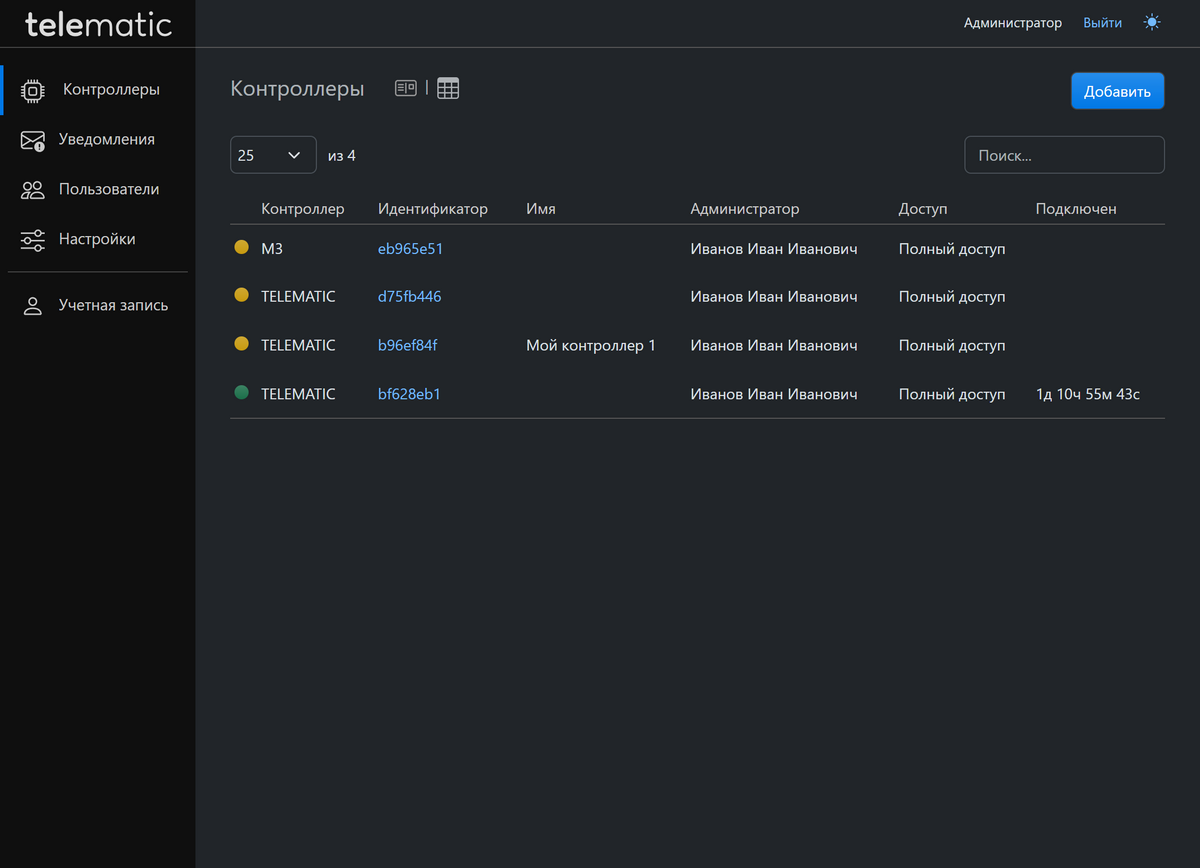
Personal account screenshots